
Rysunek 1
Stacja uzdatniania wody jako przykład zastosowania pomp wolumetrycznych
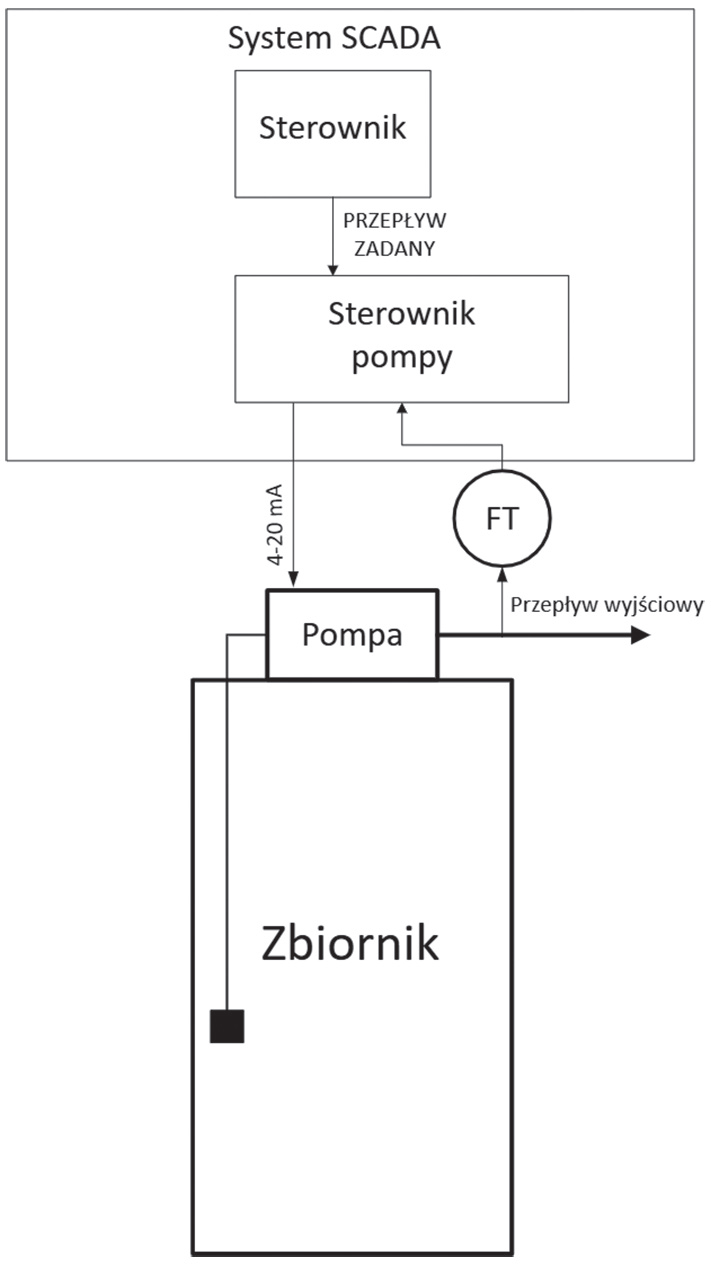
Rysunek 2
Sterowanie przepływem w pętli zamkniętej
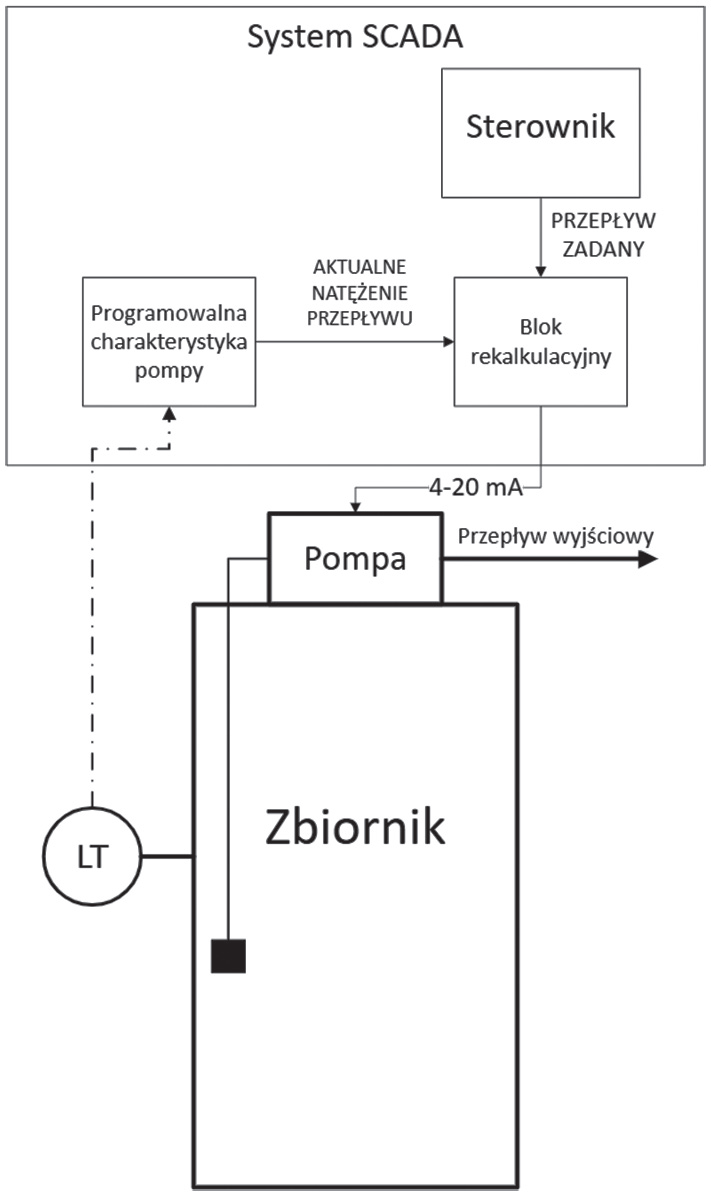
Rysunek 3
Schemat korekcji przepływu w pętli otwartej
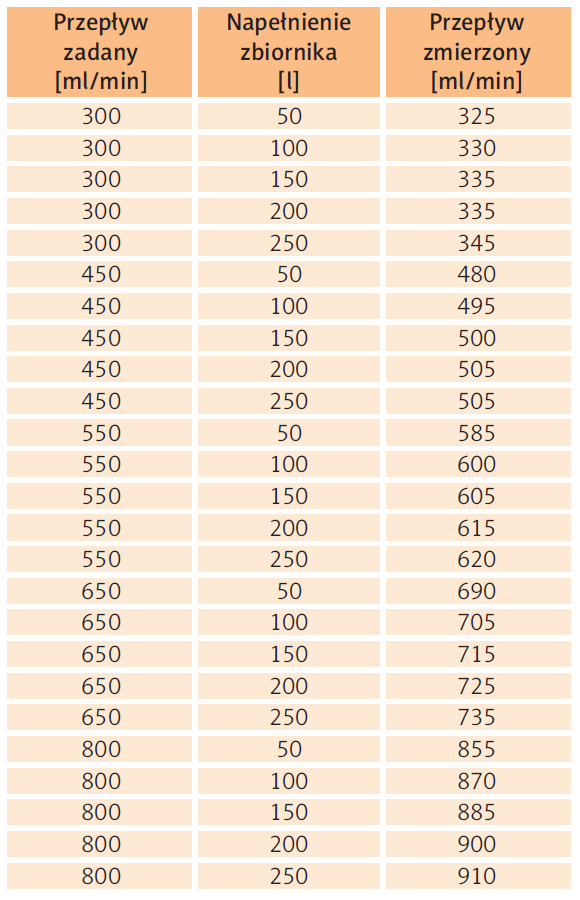
Tabela 1
Charakterystyka pompy
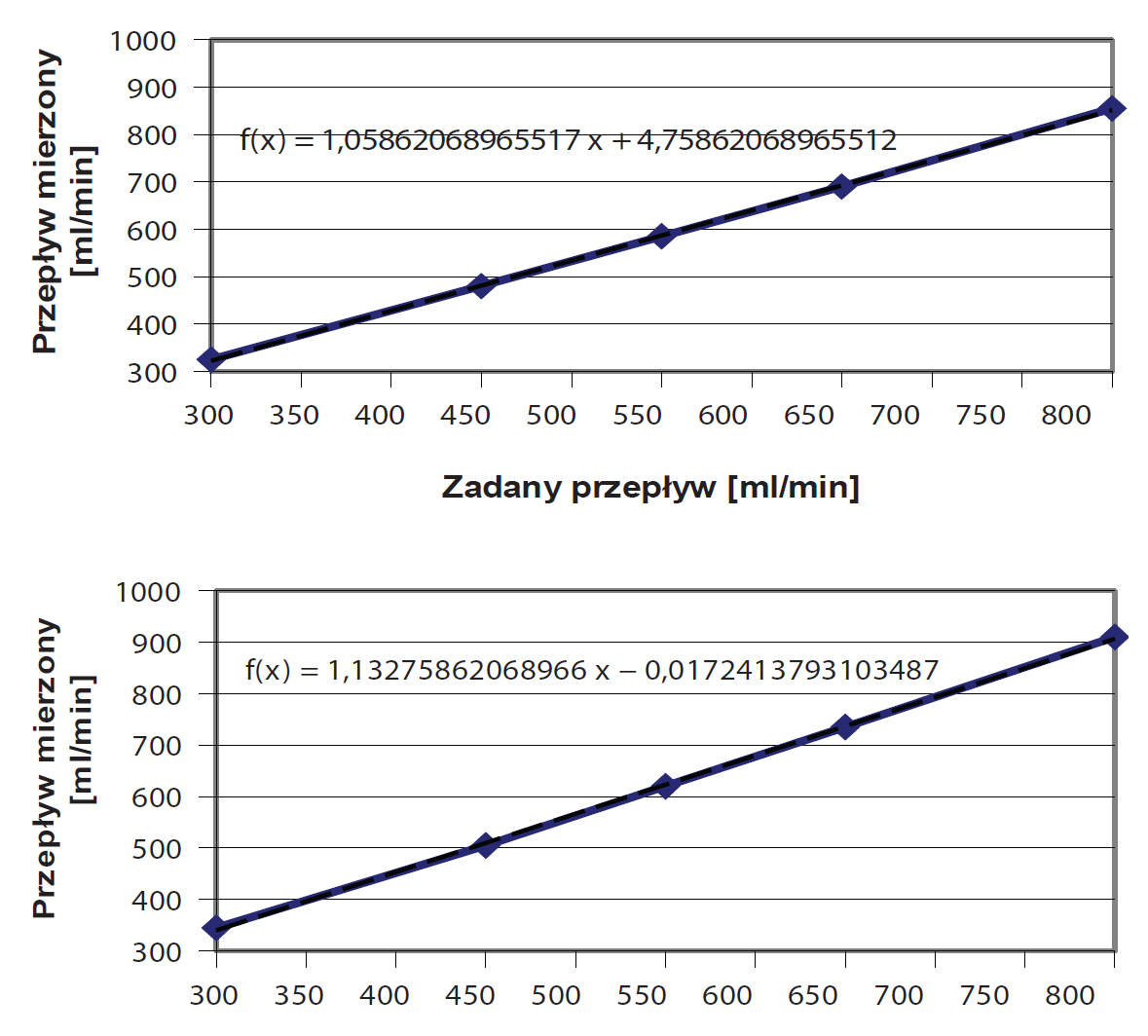
Rysunek 4
Charakterystyki pompy dla 50 [l] oraz 250 [l]
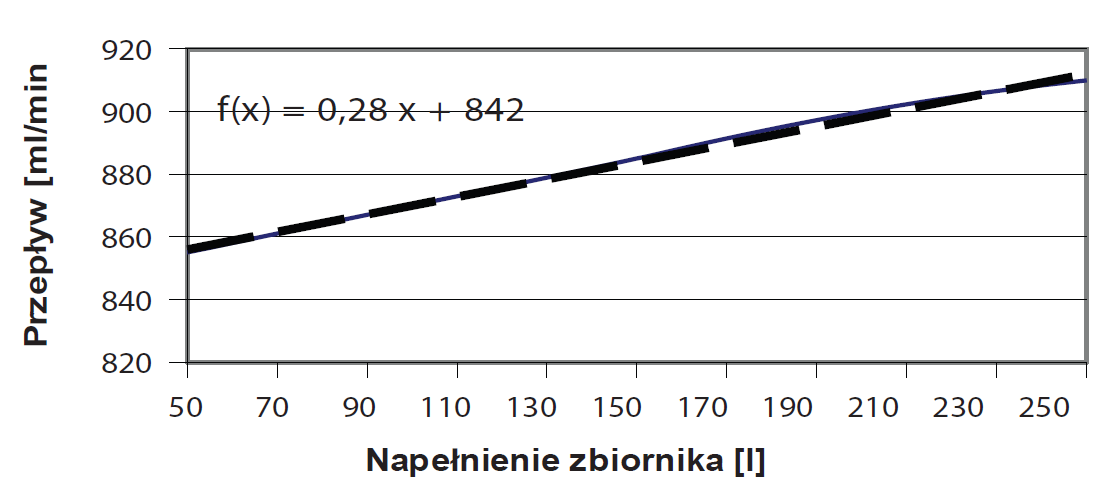
Rysunek 5
Wyniki aproksymacji liniowej – linia przerywana.
Charakterystyka pompy – linia ciągła.
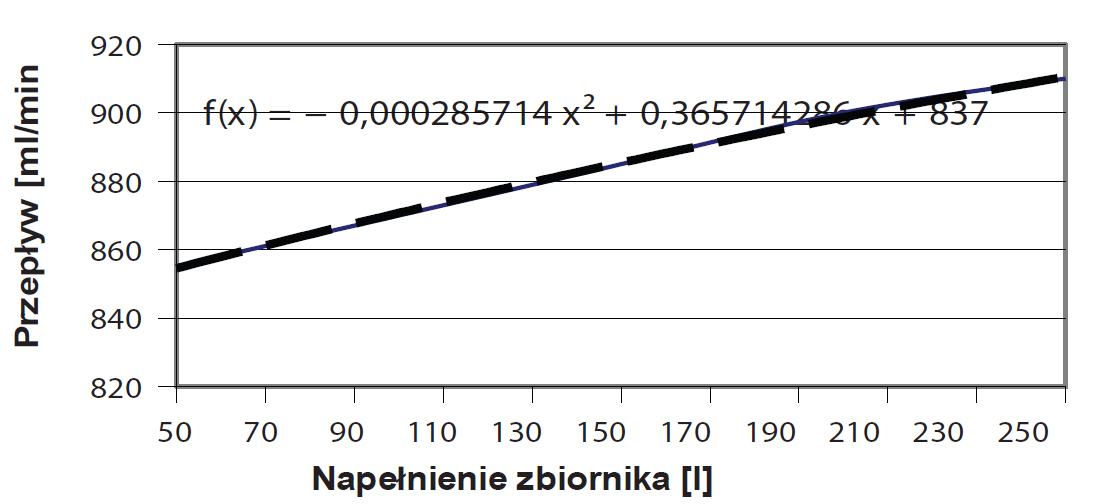
Rysunek 6
Wyniki aproksymacji nieliniowej – linia przerywana.
Charakterystyka pompy – linia ciągła.
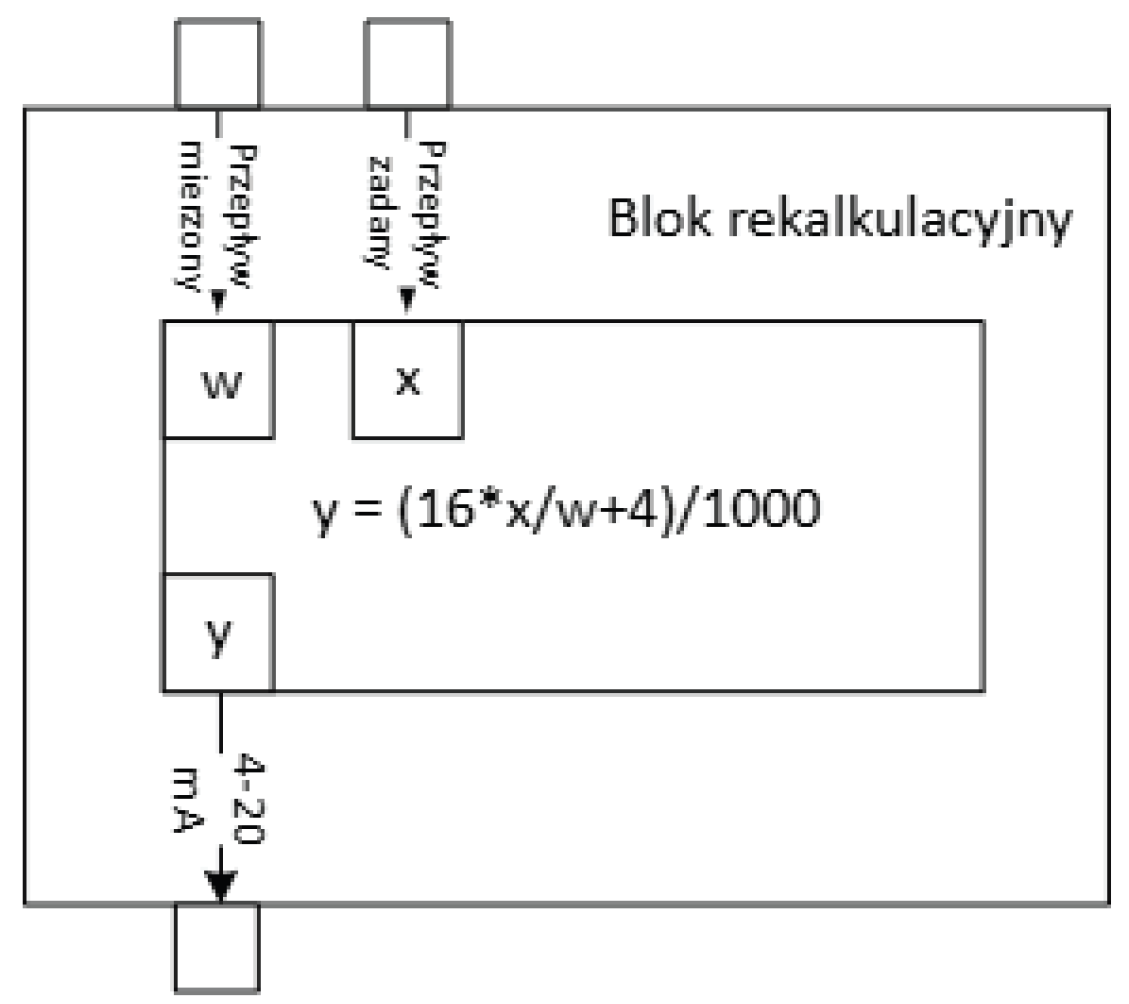
Rysunek 7
Schemat bloku rekalkulacyjnego
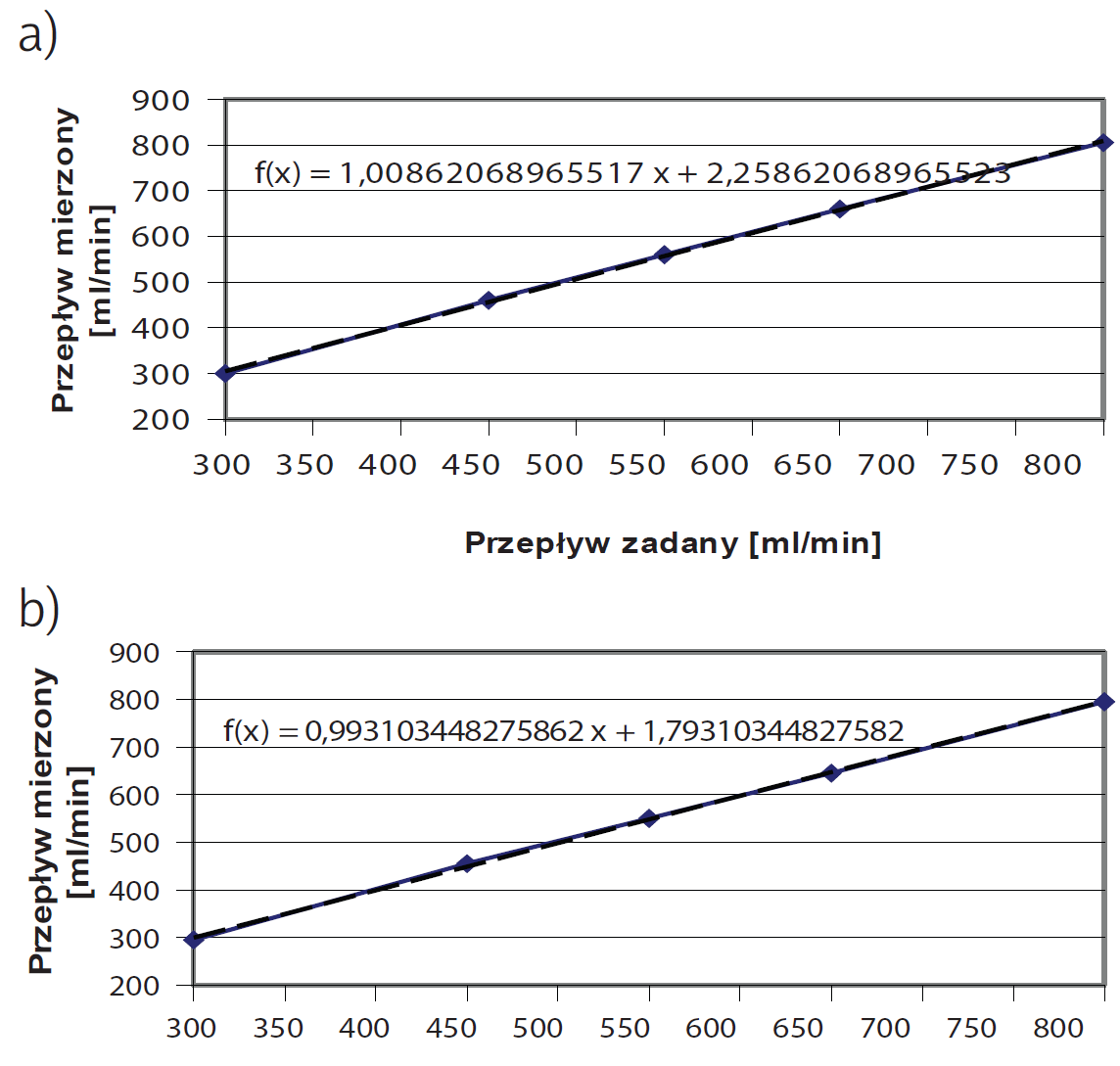
Rysunek 8
Charakterystyka pompy dla napełnienia zbiornika 50 [l] po zastosowaniu korekcji a) liniowej, b) nieliniowej




